Chapter 3.
유체 정역학 기본 방정식.
- dx, dy, dz의 미소 정육면체에 대한 미소체적 dV, 미소질량 dm
- $ dm = \rho dV $
- Body force :
\[d \vec{F}_B = \vec{g} dm = \vec{g} \rho dV = \rho \vec{g} dxdydz\]
at $-yz $ plane
\[P = p_0 + {\partial p \over \partial y} (y_L-y) = p_0 + {\partial p \over \partial y} (-{dy \over 2})\]
\[d\vec{F}_s = -({\partial p \over \partial x}\hat{i}+{\partial p \over \partial y}\hat{j}+{\partial p \over \partial z}\hat{k} )dxdydz
= -\nabla P dxdydz\]
- combining with body force,
\[d\vec{F} = (-\nabla P + \rho \vec{g})dxdydz\]
\[\nabla P = \rho \vec{g}\]
\[{dP\over dz} = -\rho g= -\gamma\]
- Constraints
- 정지유체
- 유일한 체적력(Body force) : Gravity
- z축이 수직, 위방향.
Gauge pressure
\[P_{abs} = P_{gage} + p_0\]
Manometer
\[\Delta P = g \Sigma_i \rho_i h_i\]
Plane Submerged Surface
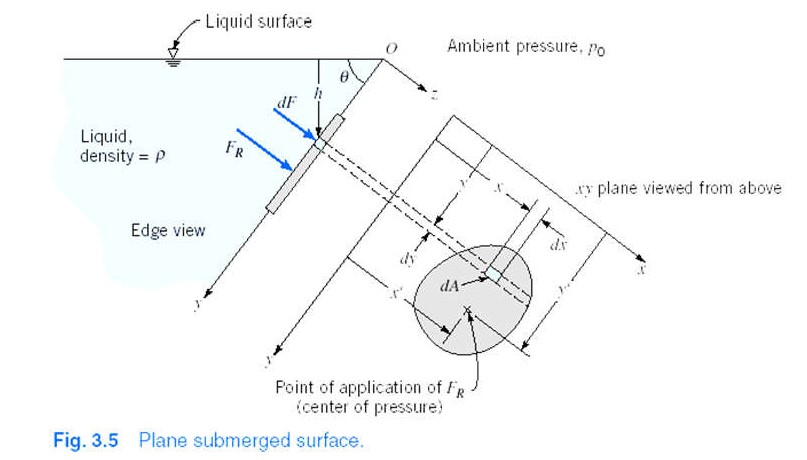
\[dF = pdA = (p_0 + \rho gh)dA = (p_0 + \rho gy \sin{\theta})dA\]
\[F_R = \int_A \rho dA = \int_A p_0 dA + \int_A \rho gy \sin{\theta} dA\]
\[= p_0 A + \rho g \sin{\theta} \int{ydA} = p_0 A + \rho g \sin{\theta} y_c A\]
\[\therefore F_R = p_0 A + \rho g \sin{\theta} y_c A = (p_0 + \rho g h_c) A\]
\[y' \cdot F_R = \int y dF = \int y PdA\]
\[\int p_0 y dA + \int \rho g \sin{\theta} y^2 dA\]
\[p_0 y_cA + \rho g\sin{\theta} I_{xx}\]
- 평행축 정리, $I_{xx} = I_{\hat{x}\hat{x} }+Ay_c^2$
\[y' \cdot A(p_0 + \rho g h_c) = p_0 Ay_c + \rho g \sin{\theta} I_{xx}+\rho g \sin{\theta} A y_c^2\]
\[y' = y_c + {\rho g \sin{\theta}I_{\hat{x}\hat{x} } \over Ay_c (p_0+\rho g h_c)}\]
\[y'=y_c + {I_{\hat{x}\hat{x} }\over Ay_c}\]
\[x' \cdot F_R = \int xdF = \int x(p_0+\rho g \sin{\theta}y)dA\]
\[= p_0 \int xdA + \rho g \sin{\theta}\int xydA\]
\[= x_c(p_0 + \rho g y_c\sin{\theta}) A + \rho g \sin{\theta}I{\hat{x}\hat{y} }\]
\[\therefore x' = x_c + {\rho g \sin{\theta}I_{\hat{x}\hat{y} }\over F_R}\]
Hydrostatic force on a curved submerged surface
- Horizontal : $ F_H = p_c \cdot A $
- 정사영 했을 때의 centroid에서의 pressure, 전체 Area
- Vertical : $ F_V \rho g V $
- 해당 면 위의 $V$만큼의 중력을 받음.
부력과 안정성
\[F_z = \int dF_z = \int_{V} \rho g dV = \rho g V\]
